Trouver le chemin le plus court entre deux points semble simple sur une carte. Dans un réseau routier, un système informatique ou une chaîne logistique, la question devient pourtant plus complexe. C’est précisément là qu’intervient l’algorithme de Dijkstra, l’une des méthodes les plus connues pour optimiser les graphes et prendre de meilleures décisions à partir de données reliées entre elles.
L’algorithme de Dijkstra sert à résoudre un problème classique : déterminer le plus court chemin depuis un point de départ vers tous les autres points d’un graphe, lorsque les distances ou les coûts sont positifs. Il a été publié en 1959 par l’informaticien néerlandais Edsger W. Dijkstra, une figure majeure de l’informatique théorique.
En optimisation de graphes, un graphe représente un ensemble de points, appelés sommets, reliés par des connexions, appelées arêtes. Chaque connexion possède un poids : une distance en kilomètres, un temps de trajet, un coût financier, une consommation d’énergie ou encore une latence réseau. L’objectif de Dijkstra est de calculer le chemin dont la somme des poids est la plus faible.
Cette méthode est dite « gloutonne » : à chaque étape, elle choisit le sommet accessible avec le coût provisoire le plus bas. Ce choix local, répété méthodiquement, permet d’obtenir un résultat global fiable, à condition que tous les poids soient nuls ou positifs.
Pour comprendre Dijkstra, il faut d’abord distinguer les éléments de base d’un graphe. Les sommets sont les nœuds du réseau : des villes, des serveurs, des stations de métro ou des entrepôts. Les arêtes sont les liens entre ces sommets : routes, câbles, lignes ou flux possibles.
Le poids associé à une arête indique ce qu’il faut minimiser. Dans un GPS, il peut s’agir du temps de conduite plutôt que de la distance. Dans un réseau informatique, il peut représenter le délai de transmission. En logistique, il peut intégrer un coût de transport, un péage ou une contrainte de livraison.
L’algorithme travaille à partir d’un sommet source. Il attribue d’abord une distance nulle à ce point de départ, puis une distance infinie à tous les autres sommets, car aucun chemin n’est encore connu. Au fil du calcul, ces valeurs sont mises à jour dès qu’un itinéraire plus court est trouvé.
Le principe est progressif. Dijkstra commence par sélectionner le sommet de départ. Il examine ensuite tous ses voisins directs et calcule le coût pour les atteindre. Si ce coût est inférieur à la distance précédemment enregistrée, la valeur est remplacée par cette nouvelle distance plus courte.
Une fois ces voisins évalués, le sommet de départ est considéré comme traité. L’algorithme choisit alors, parmi les sommets non traités, celui qui possède la plus petite distance provisoire. C’est une étape centrale : ce sommet devient le prochain point d’analyse, car aucun autre chemin non exploré ne pourra l’atteindre à moindre coût si les poids sont positifs.
Le processus se répète jusqu’à ce que tous les sommets accessibles soient traités, ou jusqu’à ce que le sommet cible soit atteint si l’on cherche seulement un trajet précis. À la fin, on obtient la distance minimale depuis la source vers chaque sommet. En conservant aussi le prédécesseur de chaque sommet, il devient possible de reconstruire le chemin complet.
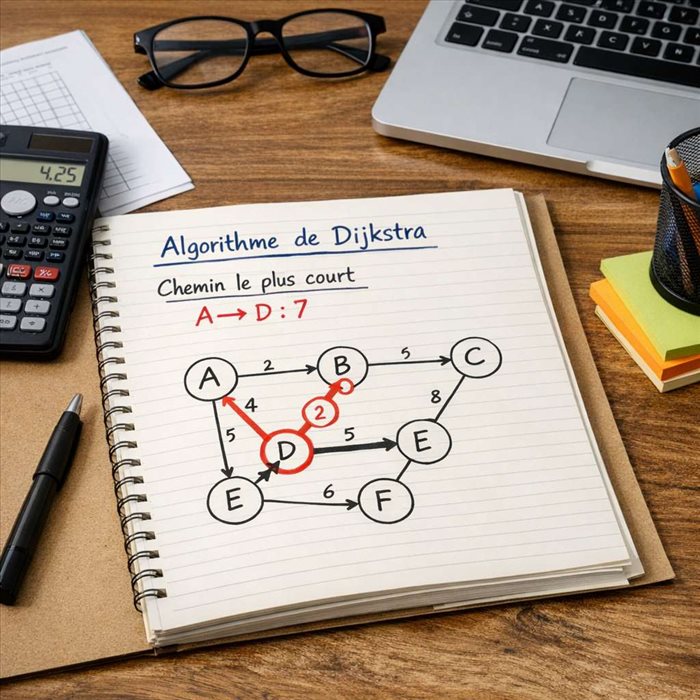
Imaginons quatre villes : A, B, C et D. La route de A vers B coûte 4 unités, celle de A vers C coûte 1 unité, celle de C vers B coûte 2 unités, et celle de B vers D coûte 1 unité. Il existe aussi une route directe de C vers D coûtant 5 unités. On cherche le meilleur trajet de A vers D.
Au départ, la distance de A vaut 0. Les autres villes ont une distance infinie. Depuis A, l’algorithme découvre B avec un coût de 4 et C avec un coût de 1. Le sommet non traité le moins coûteux est donc C. Depuis C, il atteint B pour un coût total de 3, car A-C vaut 1 et C-B vaut 2. Ce chemin est meilleur que le coût initial de 4 vers B, donc la valeur de B est mise à jour.
Depuis C, il peut aussi atteindre D pour un coût total de 6. Ensuite, B est traité. Depuis B, D est atteint pour un coût total de 4. Cette valeur remplace 6, car elle est plus faible. Le plus court chemin de A à D est donc A-C-B-D, pour un coût total de 4. L’exemple montre l’intérêt de ne pas se fier au chemin direct apparent : le meilleur itinéraire passe souvent par des étapes intermédiaires.
La force de Dijkstra tient à sa rigueur. L’algorithme ne teste pas tous les chemins possibles, ce qui serait vite impraticable dans un grand réseau. Il réduit progressivement l’espace de recherche en validant les sommets dans un ordre logique, du moins coûteux au plus coûteux.
Dans une implémentation simple, sa complexité peut atteindre O(V²), où V représente le nombre de sommets. Avec une file de priorité, souvent basée sur un tas binaire, la complexité devient généralement O((V + E) log V), E désignant le nombre d’arêtes. Cette amélioration compte beaucoup dans les graphes de grande taille, comme les réseaux routiers ou les infrastructures numériques.
Cette efficacité explique sa présence dans de nombreux outils. Les logiciels de cartographie, les protocoles de routage, les simulateurs de transport ou certains moteurs de planification utilisent des variantes de l’algorithme ou des méthodes inspirées de son principe. Dijkstra n’est pas toujours le plus rapide pour tous les cas, mais il reste une référence pour les graphes pondérés à coûts positifs.
L’algorithme de Dijkstra ne convient pas à toutes les situations. Sa principale limite concerne les poids négatifs. Si une arête possède un coût négatif, le raisonnement glouton peut devenir faux, car un sommet déjà validé pourrait finalement être atteint par un chemin plus avantageux découvert plus tard.
Dans ce type de contexte, on préfère généralement l’algorithme de Bellman-Ford, capable de gérer les poids négatifs et de détecter certains cycles problématiques. En revanche, Bellman-Ford est souvent plus coûteux en temps de calcul. Le choix dépend donc du modèle utilisé et des contraintes réelles du problème.
Autre limite : Dijkstra ne prend pas en compte, par lui-même, des facteurs dynamiques comme les embouteillages en temps réel, les interruptions réseau ou les variations de prix. Il faut alors actualiser les poids du graphe ou employer des approches complémentaires. Dans un GPS moderne, par exemple, le temps de trajet est recalculé régulièrement à partir de données de circulation.
Dans les transports, Dijkstra permet de modéliser des itinéraires entre stations, intersections ou plateformes. Un opérateur peut chercher le trajet le plus court, mais aussi le moins coûteux ou le plus rapide. Les poids ne sont pas limités aux kilomètres : ils peuvent intégrer le temps d’attente, les correspondances ou la consommation de carburant.
Dans les réseaux informatiques, l’optimisation de graphes aide à transmettre les données par le chemin le plus efficace. Certains protocoles de routage s’appuient sur des concepts proches pour choisir les liaisons les plus pertinentes entre routeurs. L’objectif est de réduire la latence, d’éviter les liens saturés et d’améliorer la fiabilité globale.
En logistique, l’algorithme peut servir à optimiser les déplacements entre dépôts, clients et points de distribution. Il ne résout pas à lui seul tous les problèmes complexes de tournées, mais il constitue souvent une brique utile. Par exemple, il peut calculer les distances minimales entre plusieurs points avant qu’un autre algorithme organise l’ordre des livraisons.
Dijkstra est souvent comparé à A*, un autre algorithme de recherche de chemin. A* utilise une estimation de la distance restante vers la destination, appelée heuristique. Lorsqu’elle est bien choisie, cette estimation permet d’accélérer la recherche, notamment dans les cartes routières ou les jeux vidéo.
La différence est importante : Dijkstra explore de manière plus générale à partir de la source, tandis que A* est guidé vers un objectif. Pour trouver les distances minimales depuis un point vers tous les autres, Dijkstra reste très pertinent. Pour atteindre rapidement une seule destination dans un grand espace, A* peut être plus efficace.
Face à Bellman-Ford, Dijkstra est généralement plus rapide, mais moins flexible avec les poids négatifs. Face à Floyd-Warshall, qui calcule les plus courts chemins entre toutes les paires de sommets, Dijkstra est souvent préférable lorsque l’on part d’une seule source. Chaque méthode répond donc à un usage précis, et l’optimisation dépend autant du problème que de la structure du graphe.
L’algorithme de Dijkstra est un outil fondamental pour trouver le chemin optimal dans un graphe pondéré. Il fonctionne en attribuant des distances provisoires, en sélectionnant à chaque étape le sommet le plus proche non traité, puis en mettant à jour les distances de ses voisins.
Sa fiabilité repose sur une condition essentielle : les poids doivent être positifs ou nuls. Dans ce cadre, il offre une solution claire, robuste et vérifiable. Avec des structures de données adaptées, comme les files de priorité, il reste performant sur des graphes volumineux.
Son intérêt dépasse largement la théorie. Du calcul d’itinéraires à la gestion de réseaux, de la logistique à la planification technique, Dijkstra illustre la puissance de l’optimisation de graphes. Il transforme un réseau complexe en décisions mesurables, en révélant le trajet le moins coûteux là où l’intuition seule ne suffit pas.